Where it all came together
Four years of iteration culminated in a vehicle that flies the full SUAS mission end-to-end: autonomous takeoff, waypoint navigation, mid-flight target identification, payload release, and return — across a 12-mile course in under 30 minutes, with all four packages delivered to sub-5 ft accuracy.
The bounce-back
First year the team made it to the SUAS international competition in Maryland, flew a full autonomous mission, and scored mission points — finishing 4th in Mission Demonstration. The big jump from the debut year, and the foundation for the cycles that followed.
Key Achievements
- · 4th in Mission Demonstration
- · 95% accuracy in target recognition
- · 15-foot payload delivery accuracy
- · 70% reduction in vibrations
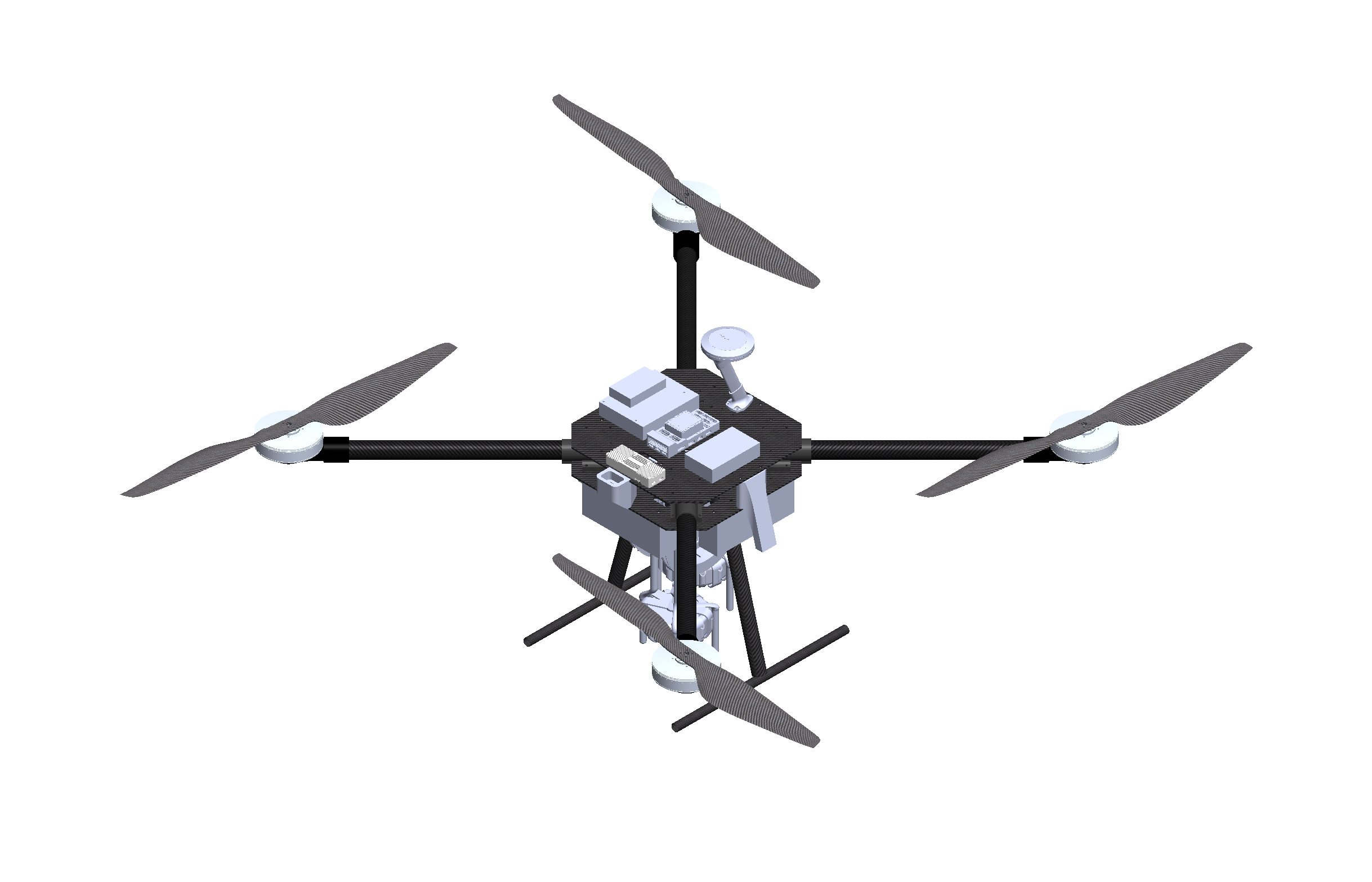
Technical Innovations
- · Custom motor mount design
The step up
Transition year. Pivoted the team from VFS DBVF to the SUAS competition — a bigger mission with payload delivery, object detection, and autonomous flight planning all required end-to-end. Stood up new subteams to handle the scope, and put the structure in place for the program's expansion.
Achievements
- · Joined SUAS Competition
- · Altitude-Triggered Mechanical Parachute Deployment
Core Development
- · Carbon fiber frame design
- · Composite manufacturing techniques
First place, first year
Freshman year. 1st place at the VFS Design-Build-Vertical-Flight Competition with a hexacopter platform built end-to-end for autonomous package delivery. The result that started everything that followed.
Achievements
- · First Place VFS Competition
- · Autonomous waypoint navigation
- · 2lb Payload Capacity
Core Development
- · Carbon fiber frame design
- · Initial autonomous system
- · Unique Landing Gear Design